
The magnetic bearing features within MADYN 2000 are:
- Design of controllers in the frequency domain with defined, practically proven controller building blocks (analogue as well as digital)
- Modelling of synchronous bearing characteristics (e.g. unbalance force rejection controls)
- Modelling of sensors and actuators for any position
- Arbitrary combination of sensors and actuators to model tilting translation control for separate controls of tilting and parallel modes or general MIMO controllers
- Control design by a combination of proven filters
- Support and assessment of controller designs by means of contrallability / observability tables, sensitivity plots according to ISO 14839-3 and Nyquist plots
- Optimization of controller parameters
- Support of control design in MATLAB ®: Export of modally reduces models as state space matrices, import of state space comntrollers
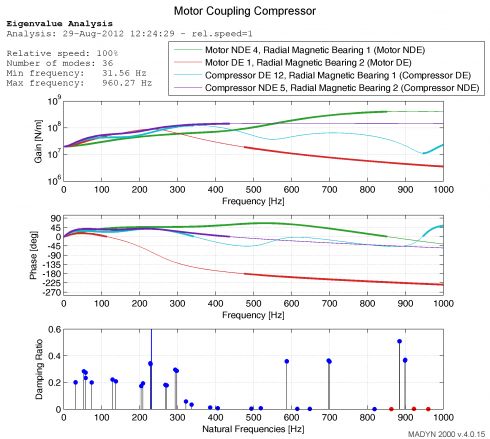
MADYN 2000 plot of magnetic bearing transfer functions and eigenvalues for a system consisting of a shaft train with four magnetic bearings (fat lines indicate frequency range with damping force)
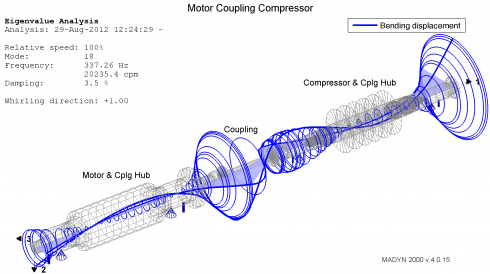
MADYN 2000 mode shape plot of a system consisting of a shaft train with four magnetic bearings
© 2026 DELTA JS AG
